
















NECは、NTTおよび三菱重の協力のもと、通信モジュールを実験用の水中無人探査機に組み込み、2.5km離れた海域を2~3ノットで航行する水中無人探査機を遠隔から制御し、水中無人探査機が収集したデータを受信する双方向通信のユースケースを実証したと発表した。今後、通信モジュールの小型化や様々なパートナーとの実証実験を進め、2024年度の商用化を目指すとしている。
商用化を目指し、水中無人探査機での活用を実証
洋上風力発電やブルーカーボンなど海洋の利活用が進むなか、設備管理や海中の調査のため、水中IoT機器や自律型無人探査機(AUV)、水中ドローンなどの運用ニーズが高まっている。
一方で、これらを効果的に運用するため、安定した水中通信の実現は喫緊の課題となっている。水中音響通信は、海中での安定した通信を実現できる技術ではあるものの、その特性上、移動体への通信にはドップラー効果の影響があり、また水平方向には海面・海底などへの反射・屈折によるマルチパス波の影響があるため、移動する機器との通信や水平方向の通信には課題があったのだ。
NECは、90年以上にわたり防衛向けにソーナーをはじめとした水中音響機器を開発している。そして、今回、NECが長年培ってきた送受波器技術や水密技術などのソーナー関連技術を応用するとともに、マルチパス波の影響を除去するNTTの時空間等化技術を組み合わせ、移動する機器間で水平方向の双方向・長距離通信を安定して行なえることを実海面で実証した。
これにより、水中音響通信は深さ方向だけではなく、水平方向の数kmの範囲で水中無人探査機や水中ドローンを制御し活用するなど、様々な海洋産業のユースケースに対応が可能となる。
同社は、「今後、水中音響通信によって、水中で活躍するドローンやロボット、水中IoT機器を広範囲かつシームレスに利用できるシステムを開発することで、海洋産業の活性化、さらには地球環境問題の解決に貢献します」としている。
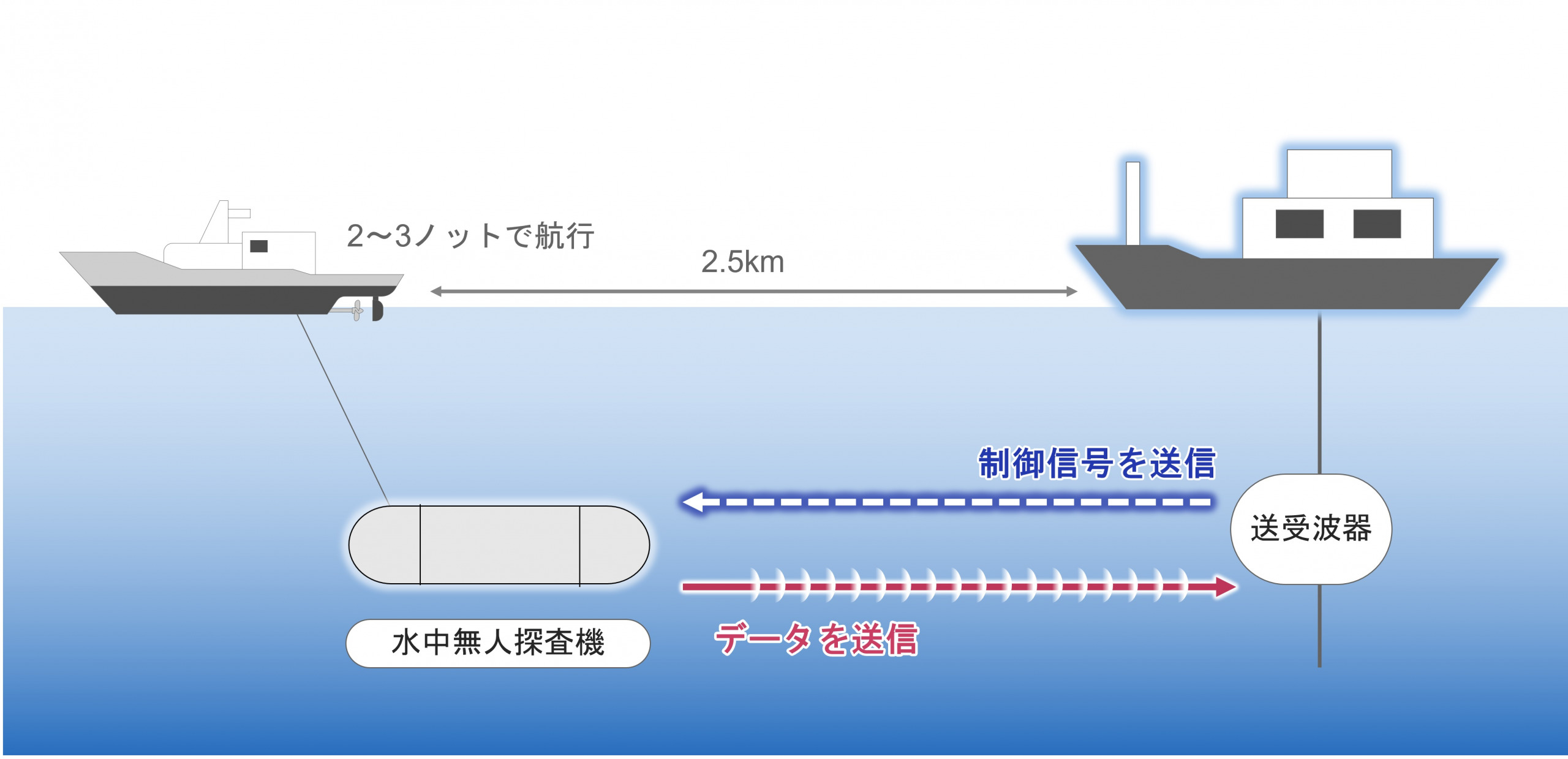 ↑実証実験の概要
↑実証実験の概要
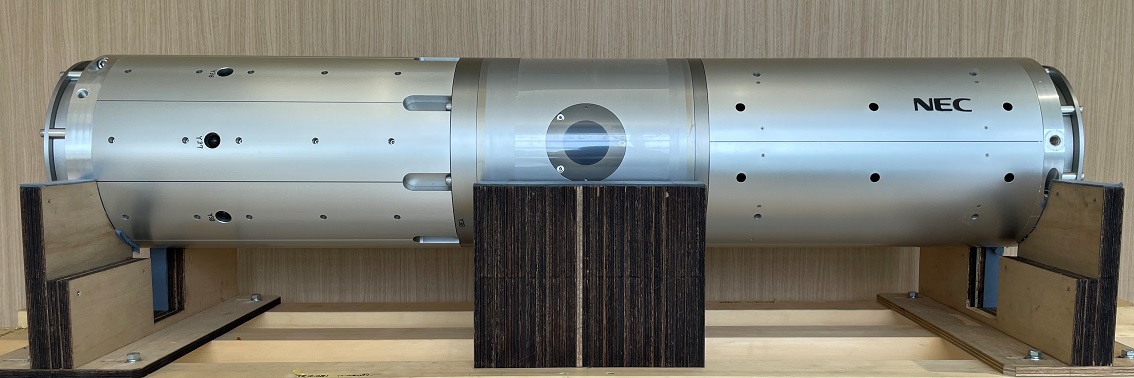 ↑水中音響通信モジュールを組み込んだ実験用水中無人探査機
↑水中音響通信モジュールを組み込んだ実験用水中無人探査機
関連情報
https://jpn.nec.com/
構成/立原尚子

